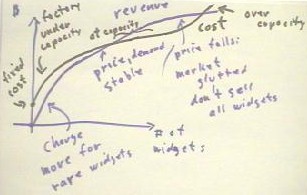
The figure below depicts curves representing the cost of producing different numbers of widgets, and the revenues projected when different numbers of widgets are produced.
The blue curve is the revenue curve. When not very many widgets are produced, it will be possible to charge more per widget and the curve will go up rapidly. Of course is no widgets are produced there is no revenue, so the graph starts at (0,0).
After a certain number of widgets are being produced, the price per widget will go down and the continue to curve will go up but not as rapidly as before. For a certain range of widget numbers the price and the demand for widgets will remain relatively stable and the curve might well straighten out. Then when the number of widgets rises too high, the price will fall due to a glut in the market and perhaps not all the widgets will even be sold, so that revenues will go up very slowly.
It should be clear that the slope of the revenue curve represents some combination of the price per widget and the number of widgets sold. A lower selling price will tend to imply a lesser slope, as well as failure to sell all the widgets. The slope at any point is equal to the change in revenue per widget produced, in units of dollars per widget.
The black curve represents the cost of producing each number of widgets. Presumably there is a widget factory to be maintained, widget records to be kept, and other costs that will accrue whether any widgets are produced or not. Thus when the number of widgets is 0 to cost will be greater than 0. This cost is called the fixed cost, and the y intercept of the graph is at this fixed cost.
When the factory is working under its capacity, manufacturing costs more per widget, and the graph of cost vs. number of widgets will rise quickly. As the factory nears its capacity the cost per widget decreases and the slope of the graph decreases, and the graph might tend to become almost straight. If the factory exceeds capacity the cost per widget might well increase, and the graph will become steeper again. These behaviors can be observed on the graph.
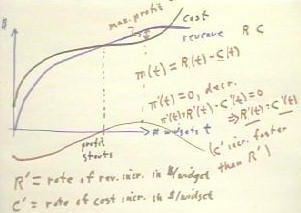
The figure below shows these curves again, with revenue again in blue and cost in red. The profit from the widget factory will be the difference between cost and revenue. We use the symbol `pi to designate the profit function (using `pi instead of p to distinguish the profit function from, say, a principle function).
We see that at first cost exceeds the revenue, and continues to do so until the two graphs meet. Up to this point revenue is less than cost in the profit will be negative. After that point, for a certain range of widget numbers, revenue will exceed cost and the profit will become positive. Then, as the number of widgets becomes too large, cost will again meet and then exceed revenue and the profit will become negative once more.
If we let `pi(t), R(t) and C(t) designate the profit, revenue and cost functions, where t represents the number of widgets, we see that the profit function `pi(t) = R(t) - C(t) must start out negative, then where the revenue and cost graphs meet will reach 0 and become for time positive before returning to 0 and then becoming negative once more. This graph is sketched in red below the original to graphs.
The maximum profit will occur when the cost function exceeds the revenue function by the maximum amount. This difference between the cost and revenue functions is labeled 'max profit' on the graph, and a vertical dotted line indicates the t value of which this maximum occurs. The function `pi(t) = R(t) - C(t) will of course have a maximum at this point.
Just before we reach this maximum-profit point, revenue will be going up faster than cost, so it will pay to manufacture more widgets. Just after we reach the maximum-profit point, revenue will be going up less quickly than cost, and we would be better off manufacturing fewer widgets. At the maximum-profit point, the cost and revenue functions are going up exactly the same rate.
The rates at which the cost and revenue functions are going up are of course the derivatives C'(t) and R'(t) of these functions. It is clear that `pi(t) = R(t) - C(t) will have critical value when `pi'(t) = R'(t) - C'(t) is equal to 0, which happens when R'(t) = C'(t). So again we see that when the profit is maximized, the derivatives of the cost and revenue functions are identical and revenue function and cost function both go up at the same rate.
We interpret R'(t) as the rate of which revenue increases, in dollars / additional widget, when we are manufacturing t widgets. Similarly C'(t) is the rated which cost increases, in dollars per additional widget, when t widgets are being manufactured.
We call R'(t) the marginal revenue, and C'(t) the marginal cost.
Once more, it should be clear that where the profit function is maximized the marginal revenue and the marginal cost are equal.
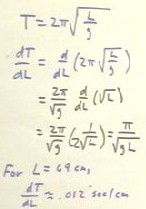
Consider now the function T = 2 `pi `sqrt(L / g), which gives the period of pendulum in terms of its length L. We calculate the derivative dT / dL, obtaining dT / dL = `pi / `sqrt(g * L).
We see that when L = 69 cm, dT / dL must therefore be `pi / `sqrt( 980 cm / sec * 69 cm) = .012 sec / cm. We interpret this as saying that in the vicinity of length L = 69 cm, and additional cm of length will give us an additional .012 seconds on the period of the pendulum. That is, the pendulum. Will go up that the rate of .012 seconds per additional centimeter.
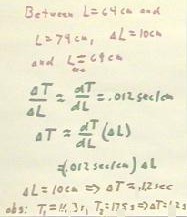
We can use this knowledge to estimate the difference in the period between a pendulum of length 64 cm and another pendulum of length 74 cm. The mean of these lengths is 69 cm, so we expect that `dT / `dL will be approximately equal to dT / dL = .012 sec / cm. The 10 cm length difference will therefore result in a period difference of `dT = dT / dL * 10 cm = .012 sec / cm * 10 cm = .12 sec.
You can and should check this out. Accurately time, say, 100 cycles of a 64 cm pendulum and 100 cycles of a 74 cm pendulum and determine the time required per cycle at each length. These times will be the periods of the two pendulums, and should differ by approximately .12 seconds.
The bottom line of the figure below shows the results of observations done in class, where we obtained T1 = 1.63 sec for length 64 cm and T2 = 1.75 sec for length 74 cm; the difference is .12 sec, which is consistent with the prediction made here.
Next we predict the time required for a pendulum of length 67 cm to fall one completes cycle behind a pendulum of length 71 cm.
The period of a pendulum of length 69 cm will be approximately 1.67 seconds. The period of the the shorter pendulum will be less than this by 2 cm * .012 sec / cm = .024 sec, while the period of the longer will be greater than this by .024 sec. It follows that for each. The larger pendulum will fall behind the smaller by .048 sec.
If the pendulums start out in phase, they will again be in phase when the longer has fallen 1.65 seconds behind the shorter. At .048 sec / cycle, this will require 1.65 s / .048 sec / cycle = 34 cycles of the shorter pendulum. This agrees well with an observation made in class, where pendulums of these lengths were started in phase and appeared to be again in phase after 31 cycles of the shorter pendulum.
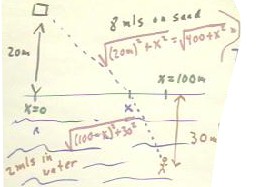
A fairly typical modeling problem concerns a lifeguard who must get to a swimmer in distress as quickly as possible. The lifeguard is 20 meters from the water and 100 meters in the direction of the water line from the swimmer, and a swimmer is 30 m away from shore, as indicated in the figure below. The lifeguard can run at 8 m/s on sand and can swim at 2 m/s in the water. The question is what point to lifeguard should enter the water in order to get to the swimmer in the lease possible time.
If we let x stand for the distance moved by the lifeguard in the direction of the water line, then in terms of x we can find the distance moved across the sand and through the water. Knowing the speeds of the lifeguard on sand and in water, we can then find an expression in terms of x for the time required to reach the swimmer.
The path of the lifeguard from the lifeguard station to the position x along the water line forms the hypotenuse of the right triangle whose sides are 20 meters and x. The length of this hypotenuse is easily found by the Pythagorean Theorem to be `sqrt(400 + x^2) meters, provided x is measured in meters. Similarly the path through the water is the hypotenuse of the right triangle whose legs are 30 meters and (100 m - x). This distance is thus `sqrt( (100 - x) ^ 2 + 30 ^ 2) meters, when x is in meters.
The time required for the lifeguard to reach the swimmer will therefore be
T(x) = time across sand + time thru water = dist across sand / speed on sand + dist across water / speed in water, or
T(x) = `sqrt(400 + x^2) / 8 + `sqrt(900 + (100 - x) ^ 2 ) / 2,
where we understand that time will be measured in seconds.
To determine the position x required to minimize time T(x), we find the derivative T'(x) of the time function. We obtain the expression given below. This expression will be set equal to 0 to find the critical point(s). We will then most likely use a first-derivative test to determine whether we have a maximum or a minimum at each critical point.
The actual calculation of the critical point might be cumbersome; an acceptable solution might be obtained by graphing T'(x) using DERIVE, and looking at the zero(s) of this graph, which will be critical points for T(x). The graph will tell us what we need to know about the first-derivative test at each of the zeros.
"