Calculus II Class 03/10
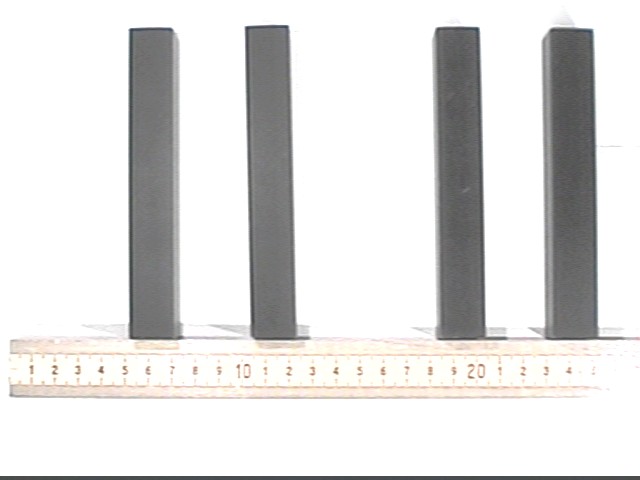
The figure below depicts a side view four bars balanced on a meter stick. We wish to find the location of the balancing point. If the mass of the meter stick is negligible and if the mass of each bar is 300 grams, we calculate the 'torque' of each bar about the left-hand end by calculating the moment of each, which 300 grams * moment arm, and summing all 'torques'. (Note that these aren't really torques because torque is force * moment arm and 300 grams is not a force but rather a mass. Gravity exerts its force on the mass and it is this force that results in torque. However that's a fine point that we can leave to physics students. Here we'll treat the mass like a force.)
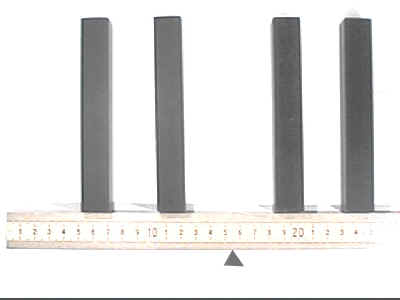
If the system is balanced at a point xMean then the total 1200 grams must be supported at this point, and the torque exerted by the balancing point must be 1200 grams * xMean in the counterclockwise direction. Since this torque must exactly balance the clockwise torque exerted by gravity our two torques 18450 gram cm and 1200 grams * xMean must be equal in magnitude. We therefore have
which we easily solve to get
The figure below shows the system balancing at its center of mass.
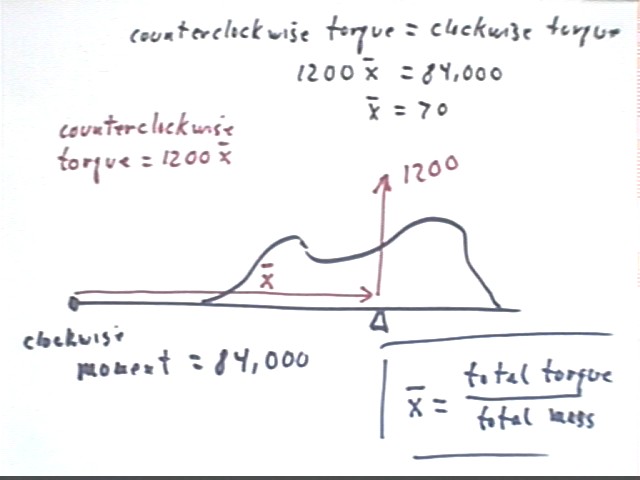
Another system, with a continuous mass distribution, is analyzed by summing the masses and the torques about the x = 0 point to have total mass 1200 grams and total clockwise torque (also called clockwise moment) 84,000 gram cm.
If the balancing point of the system is at xMean, represented by the x with the bar over it, then the support must exert a enough upward force to support the 1200 grams at distance xMean from the pivot at x = 0. The counterclockwise moment, or torque, will be 1200 * xMean.
Thus the system balances at point xMean = 70.
We generalize this procedure to probability distributions. Instead of mass we will be using area and we will be using Riemann Sums which approach the integrals we will evaluate.
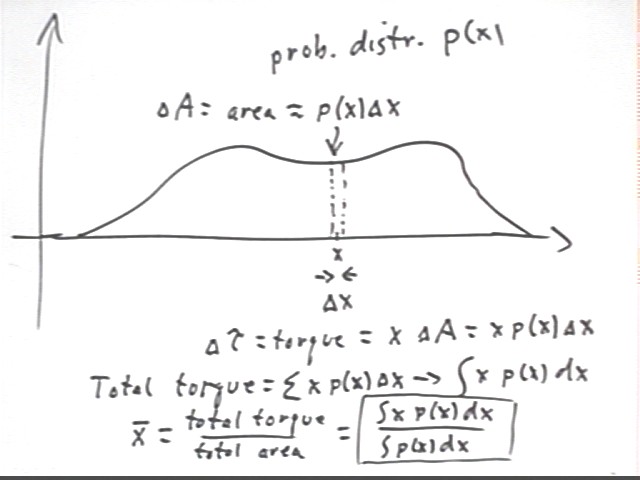
The figure below represents a probability distribution p(x). Instead of one of the metal bars in the initial example we use a thin slice of the distribution having width `dx and located near position x.
torque increment = `dTau = x * `dA = x * p(x) `dx.
The mean xMean will as before have the property that xMean = total torque / total mass, or in this case where mass is represented by area, xMean = total torque / total area.
Total torque is the sum of all the `dTau contributions, which as `dx shrinks toward zero approaches the integral of x p(x) with respect to x.
Total area is the sum of all the `dA contributions, which as `dx shrinks toward zero approaches the integral of p(x) with respect to x.
If p(x) is a probability distribution then the total area beneath its graph is 1 and the denominator is therefore 1, so we have
The integral in every case extends from -infinity to infinity. Note that many probability distributions are defined only over a finite interval or a half-infinite interval (e.g., for x > 0) and are therefore considered zero elsewhere.
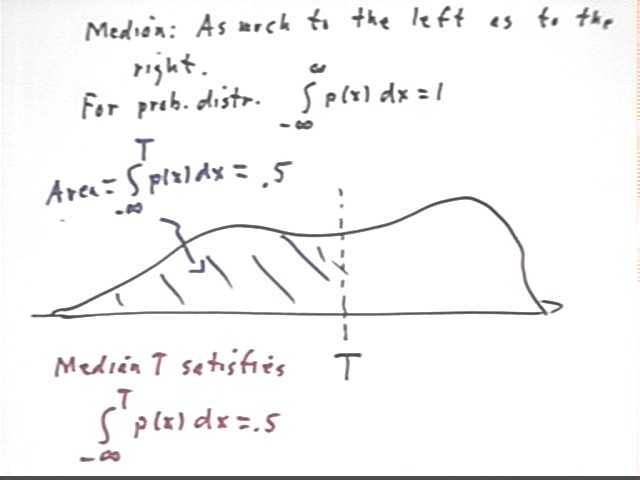
The median of a distribution is the 'middle' of the distribution in the sense that the median is that location in the distribution for which the probability to the left is .5 and the probability to the right is .5.
If we let T stand for the median then the condition for T is that probability( x < T ) = probability (x > T) = .5.
If probability (x < T) = .5 it follows that probability(x > T) = .5. Since probability(x < .5) = integral (p(x) dx from x = -infinity to T) our definition of the median is
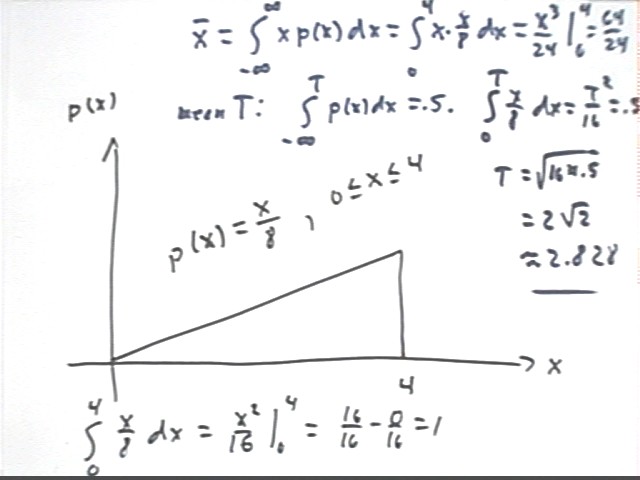
If p(x) = x/8, 0 < x < 4, with p(x) = 0 elsewhere then
A probability distribution must be nonnegative and its integral from -infinity to infinity must be 1.
p(x) = 0 for x < 0 and for x > 0 so its integral from -infinity to infinity is just int(x/8), x, 0, 4). We show that this integral is 1:
Median is T such that int(x/8,-infinity, T) = .5.
Mean is
We therefore have
Note that the mean and median are not generally the same, though for some distributions they do coincide.
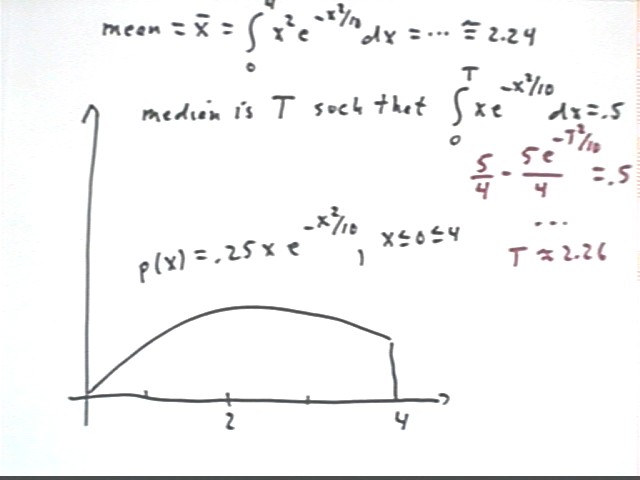
Recall the probability distribution function for a player whose density function is e^-(x^2/10). We saw before that this density function leads to the probability function p(x) = .25 x e^-(x^2/10). (The .25 is the constant needed to make the integral of p(x), from -inf to inf, equal to 1, so we know that this is a probability distribution.)
Find the mean and median for this distribution.
Introduction to Sequences and Series
Consider someone who wants to travel 8 feet but isn't sure how to go about it. This person first travels half the distance, 4 feet, then travels have the remaining distance or 2 feet, then again half the remaining distance or 1 foot. The person continues in this manner.
The figure at the bottom of the page indicates how the sum can be represented by the total area of a series of rectangles along the x axis.
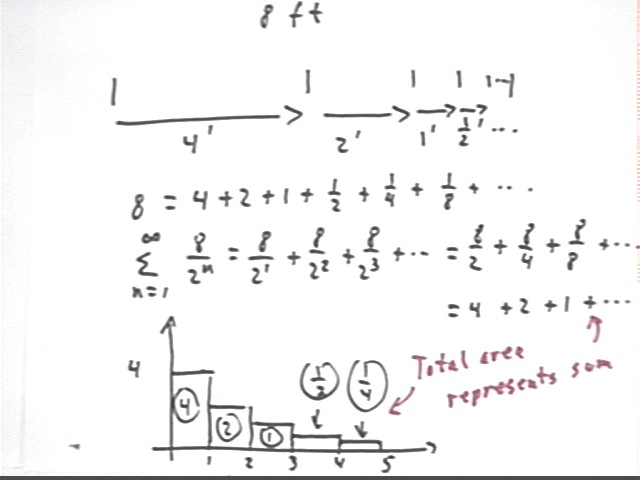
Now observe the following:
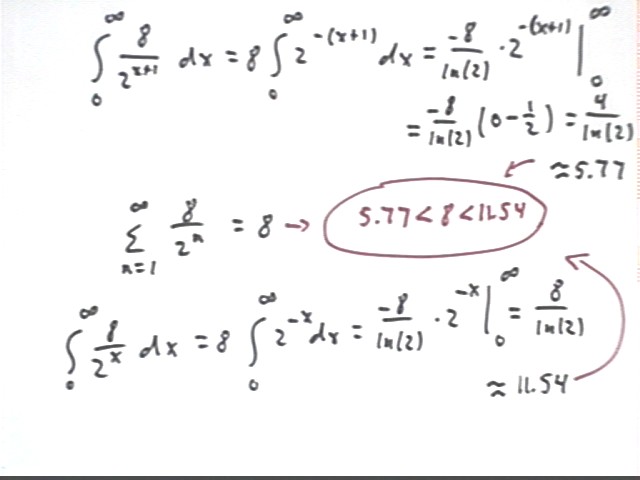
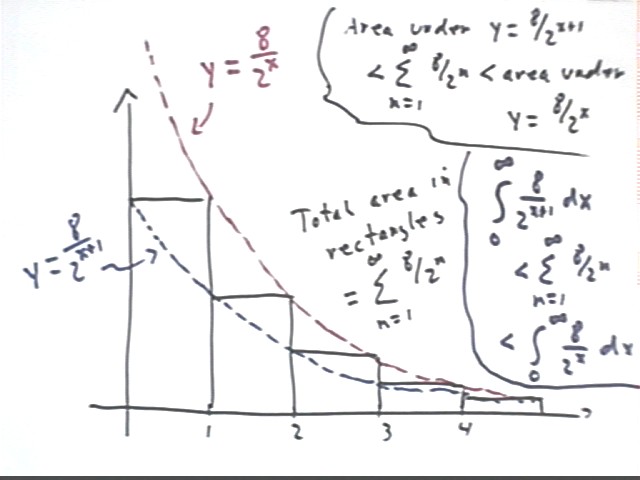
We conclude that the total area of all the rectangles is less than the area under the y = 8 / 2^x curve for x > 0, and the total area of all the rectangles is greater than the area under the y = 8 / 2^(x+1) curve for x > 0.
integral(8 / 2^(x+1) dx for x from 0 to infinity) < sum(8 / 2^n for n from 1 to infinity) < integral(8 / 2^x dx for x from 0 to infinity.
This inequality is written in conventional notation in the figure below.
If we evaluate the integrals and the sum we verify the inequality