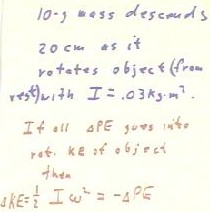
Problem 1: If all the potential energy lost by a descending 10-g mass goes into the rotational kinetic energy of an object (e.g., a beam, a disk, etc.) whose moment of inertia is .03 kg m^2, then if the object starts for rest what will be its angular velocity after the mass is descended 20 cm?
Solution: If no energy is dissipated, as is implicit in the conditions of the problem, the change in the kinetic energy of the system must be equal to the negative of the change in potential energy, since `dKE + `dPE = 0. Since the rotating object starts from rest, the change in kinetic energy at any time is just its kinetic energy: 'dKE = KE = .5 I `omega^2.
Thus we have .5 I `omega^2 = - `dPE.
We solve this relationship for `omega, as indicated below. At this point we know everything we need to determine `omega except `dPE.
The change `dPE in potential energy as the altitude of the object changes by -20 cm is `dPE = -20 cm * 10 g * 9.8 m/s^2. Converting the cm and g to meters and kg we find that `dPE = -.02 J.
We substitute this potential energy change into the expression we have derived for `omega and obtain our result.
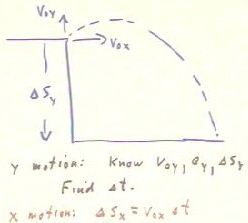
Problem #2: Given the initial magnitude and angle of the velocity of a projectile and the altitude from which is fired, how we find the range of projectile?
If the initial magnitude and angle of the projectile are known, we can easily find the initial x and y velocities v0x and v0y.
We use the basic principle of projectile motion, that the motion in the x direction in the motion in the y direction are completely independent of one another except that they share a common time interval. Since we know 3 of the five basic kinematic variables for the y motion, we will solve the y motion to find `dt. We will then simply multiply the initial x velocity, which does not change during the free fall of the projectile, by this time interval to obtain the horizontal range.
We know the initial velocity, displacement and acceleration v0y, ay and `dsy for the y motion. We can therefore obtain `dt easily by using the equations of kinematics. The rest of the problem (multiplying v0x by `dt) is then trivial.
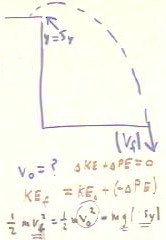
Problem #3: Given the final speed of a projectile and the altitude from which it was fired, how do we determine the initial speed of the projectile?
We know nothing about the angle of which the projectile was launched. We can still solve the problem using energy considerations, and as it turns out that the initial angle doesn't matter.
We implicitly assume that there are no dissipative forces acting on the projectile, so that total energy is conserved: `dKE + `dPE = 0. We know that `dPE = m g `dy; since `dy = -sy, we see that `dPE = - m g sy.
We can therefore write `dKE = - `dPE = - (-m g sy). Of course `dKE = KEf - KE0, so KEf - KE0 = m g sy, and KEf = KE0 + m g sy. That is, the final kinetic energy equals initial kinetic energy plus the work required to raise the object altitude sy (we retain the initial kinetic energy and we get back the work used to raise the object).
Writing KEf and KE0 as .5 m vf^2 and .5 m v0^2 we obtain the final equation below. We note that the mass divides out of the equation, leaving us with the variables vf, g and sy, all of which are known (as indicated by the double underline), and v0, which is what we what to find (as indicated by the fact it is circled).
We can easily solve this equation for v0, at which point we substitute the values of the known variables.
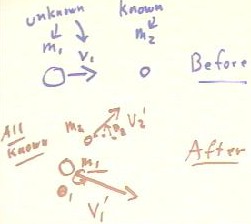
Problem #4: Given the magnitudes and angles of the after-collision velocities of two objects, one of known mass and one unknown, and knowing also that before collision the known mass was stationary and that the velocity of the unknown mass was in the x direction, how do we find the mass and before-collision speed of the unknown mass?
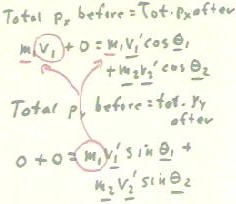
Solution: We depict the situation as below. The mass m1 and speed v1 of the first object are indicated as unknown, while the mass m2 of the second object is indicated as known (as is its before-collision velocity 0). The magnitudes v1 and v2 and angles `theta1 and `theta2 of the two objects after collision are also depicted, though we do not at this point have much confidence that the picture is accurate (in fact is not, since the after-collision velocity of the first object seems greater than its before-collision velocity, which in this case would violate conservation of energy).
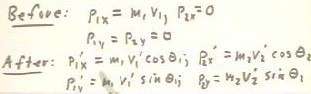
We list what we know about the momenta of the object before and after collision. Before collision only the first object has nonzero momentum, and all the momentum is in the x direction. Therefore only p1x = m1 v1 is nonzero.
After collision the x and y momentum of the first object are p1x' = m1 v1' cos(`theta1) and p1y' = m1 v1 sin(`theta1), and those of the second object are given by analogous expressions, as indicated below.
Conservation of momentum tells us that the total x momentum before collision is equal to the total x momentum after collision, and the total y momentum for collision is equal to the total y momentum after collision. Using the expressions from the preceding picture for the various momentum before and after collision, we obtain the two equations below.
In this case in turns out that m1 is the only unknown quantity in the equation for the conservation of y momentum. So we will be able to solve this equation for m1. Substituting this value of m1 back into the first equation we will be able to solve the second for the remaining unknown v1.
In general our equations for x and y momenta can be solved for any two of the variables m1, v1, m2, v2, v1' and v2', provided we know the values of the other four.
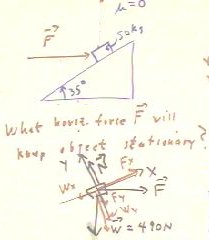
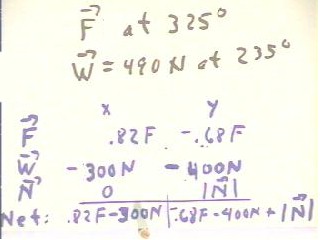
Problem #5: We next ask what horizontal force is required to hold a 50 kg object stationary on a frictionless plane inclined at 35 degrees above horizontal.
Solution: We begin by depicting the forces acting on the object. We will call horizontal force F. In addition to this force we have the weight of the object and the normal force exerted by the plane on the object. Since there is no frictional force and nothing but the inclined plane touching the object, these will be the only forces acting on it.
These three forces, F, W and N, are depicted in black in the figure below. We choose to orient the x axis parallel to the plane and the y axis perpendicular, though we could as easily solve this problem with the x axis oriented in the horizontal and the y axis in the vertical direction.
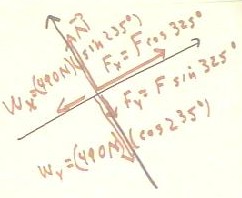
As usual, we will represent the forces by their components parallel to the two coordinate axes, so that F will be replaced by its components Fx and Fy, and W by its components Wx and Wy. These components are indicated in red in the figure below. We note that the normal force is already parallel to the y axis.
The figure below shows the components of the three forces. These components are in every respect equivalent to the original three forces, so in this figure we have replaced the three forces by their components.
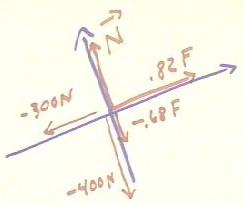
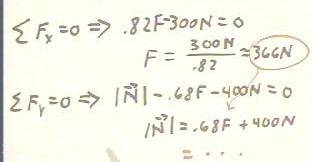
The figure below shows the simplified expressions for the components of the three forces. We can at this point see that for x equilibrium, .82 F must equal 300 N and that for y equilibrium, the magnitude | N | of the normal force must be sufficient to balance the weight and the y comonent of the horizontal force.
We list the x and y components of the three forces and the components of the net force. The x component of the net force is equal to the sum of the x components of the three forces, and assembly statement applies to the y components.
The condition of x equilibrium is that the sum of all the x forces is zero. Thus we have .82 F - 300 N = 0, which we easily solve to get F = 366 N.
The condition of y equilibrium is also written in figure below. This condition allows us to determine magnitude of the normal force, using the expression for F obtained from the x equilibrium condition.
Problem #6: Next we consider a wheel whose axle has radius r. Around the axle is wound a string from which hangs a mass m. The mass descends from rest through a known distance `dy in time `dt, and we assume that its acceleration is uniform. We wish to know what the final angular velocity `omegaf of the wheel will be.
Solution: We start by finding what we can most easily find. We know the initial velocity of the mass, its displacement and the time required. Since its acceleration is uniform we can easily use our knowledge of kinematics to reason out the final velocity (in this case the initial velocity zeros of the final velocity will be double the average velocity, which is easily found).
Now looking more closely at the axle, we see that the final velocity of the mass will equal the velocity of the point on the outer rim of the axle. This velocity is connected to the angular velocity of the axle by the definition of the radian (an angle of one radian corresponds to a distance r along the rim of the axle, so each radian/second corresponds to speed of r meters per second, assuming that r is in meters).
Either by reasoning or by remembering the relationship of angular velocity to velocity on a circle, we see that `omegaf = vf / r. Since the wheel rotates with its axel, this is also the angular velocity of the wheel.