Solutions to follow . . .
The following review topics include questions that, along with minor variations on some questions, will be included in the problem bank for the final exam. Other questions not on this list will also be included, as will all questions from the problem banks for the two tests.
The review will consist of solutions to these questions and problems.
These questions and problems are classified as follows: The Modeling Process Equation Solving Properties of Functions
This document contains outlines of answers for the first section.
1. Quadratic models based on 3 points
Given three points on a graph of depth vs. clock time, how do we obtain a quadratic model y = f(t) = a t^2 + b t + c for the associated depth vs. clock time function? How do we use that function to predict the depth for a given clock time, and how do we use the function to predict the clock time in which a given depth will occur?
The first figure below is a schematic of the process of substituting the coordinates of the three points into the general quadratic equation, then substituting the solution into the general form of the equation to obtain a specific model.
The second figure shows how we substitute a known clock time t for the variable x to obtain the depth y at that clock time. Recall how this is depicted graphically by projecting from the x axis to the graph then to the y axis. The second part of this figure shows how we substitute a given depth for y to obtain a quadratic equation which we solve for x. This solution gives us to clock time t = x at which the depth is achieved.
2. Linear models based on 2 points
Given two data points on a graph of spring length vs. suspended weight, how we obtain a linear model y = f(x) = mx + b for the weight vs. spring length? How do we use this function to predict the spring length for a given weight, or determine the weight from a given spring length?
The first figure below is a schematic of the process of substituting the coordinates of the two points into the general linear equation, then substituting the solution into the general form of the equation to obtain our specific model.
The second figure shows how we translate our y = mx + b model into a model of spring length vs. weight using the variables springLgth and wt. We obtain the equation springLgth = m * wt. + b, which can be used directly to find the spring length given the weight. Or we can solve the equation for the weight, obtaining a form which we can substitute the spring length and directly determine the weight.
3. Linear models based on regression line
Given a set of data points on a graph of flow rate vs. clock time, how we obtain a linear model y = f(x) = mx + b for the flow rate vs. clock time? How do we use this function to predict the flow rate for a clock time, or determine the clock time at which a given flow rate will occur?
The figure below shows a given data set in the form in which it appears in DERIVE. The linear regression line is the 'best fit' straight line for this data, as obtained using the DERIVE syntax fit([x,mx+b], #), where # is the line number.
Our interpretation of the equation in the given situation is that y is the flow rate, for which we use the variable name flowRate, and x is the depth, which we will use for the corresponding variable name. We obtain an equation reads flowRate = m * depth + b. This equation can be solved for depth to obtain depth = (flowRate - b) / m.
4. Power-function models
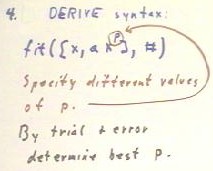
Given a set of (x, y) data points, how can we use DERIVE to determine by trial and error the power function that best models these data points?
The DERIVE syntax for fitting a power function is fit( [x, ax^p], #), where # is the line number and p is a specific number we use for the power function. We could equally well use k x^p rather than a x^p in this syntax; the symbol in front of x^p could be anything but x and the result would be the same.
We can use trial and error with different values of p to find the approximate best value of p, and therefore the best power function to use for the data.
This is not required knowledge, but the command vector ( fit( [x, ax^p], #), p, .5, 3.5, .5) tells DERIVE to perform a power-function fit for the data in the line given by #, using values of p from .5 to 3.5 and changing by .5 each time (i.e., p will be .5, 1, 1.5, 2, 2.5, 3, 3.5). If we approXimate this command, we obtain all 7 of these power functions. If we plot the resulting expression we will get all 7 plots.
5. Polynomial Models
Given a set of data points, how can we find a polynomial model that exactly fits the set? How do we determine the appropriateness of the polynomial as a model of the phenomenon represented by the data set?
The figure below shows the syntax for the DERIVE fit of the polynomial model. Instead of the symbols n, n-1, ..., we would use actual powers (e.g., 5, 4, 3, ...). We must have more data points than the highest power or the fit won't work; that is, n must be < the number of data points.
If the degree of the polynomial is one less than the number of data points the polynomial of fit the data points exactly, which means that it will 'wobble' around to accommodate any errors we have made in our observations or which arise from unavoidable uncertainties in our observations. This does not mean that the model is correct; it can reveal little more than our use of 'overkill' with a high-degree polynomial. We are usually more interested in a smooth curve their reveals something about the actual underlying behavior of the system we are observing.
6. Exponential Models based on 2 points and asymptote
Given two representative points and an estimate of the asymptote of a set of data for which an exponential model is expected (e.g., for the temperature of a cooling object, the population of a freely reproducing organism in a favorable environment, the value of an investment in a stable economy, the activity of a radioactive sample), how do we obtain an exponential model of the form y = A b^x + c or of the form y = A e^(kx) + c for the phenomenon?
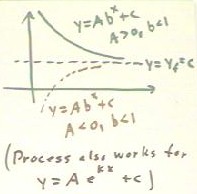
The figure below is a schematic of the process. Since an exponential function y = A b^x + c is asymptote to the line y = c (if b < 1, y will approach c as x becomes a large positive number; if b > 1 y will approach c as x becomes a large negative number). So if we observe that y = yf is our asymptote, we will substitute this value for c. We then substitute the x and y values of two data points to obtain to equations in A and b. We solve these equations and substitute A, b and our asymptote c into the form to obtain our model.
The graph of our function will approach the asymptote for either positive or negative values of x. The graphs shown in the second figure below are both for values of b < 1, so that we approach the asymptote for positive values of x. In one graph, as labeled, A is positive well in the other it is negative.
This process also works for the form y = A e^(kx) + c. If after solving we obtain k > 0 our graph will be like that for b > 1, while negative values of k given graph like those we obtain for b < 1. In fact, our solution will be equivalent to y = A b^x + c for b = e^k.
7. Linearizing data
How do we use inverse functions to linearize a data set? How do we reverse the linearization after obtaining the linear model?
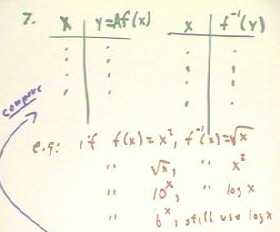
The figures below show us how the original y = A f(x) data set is transformed by taking f^-1(y), using the appropriate f^-1 function (e.g., `sqrt(x) for x^2 data, x^2 for `sqrt(x) data, log x for any b^x or e^(kx) data).
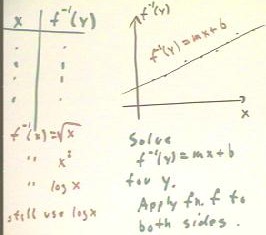
The second figure shows how we then proceed to graph our transformed data, and use an estimate or linear regression to obtain the equation f^-1(y) = mx + b. We solve this equation for y by applying the original function f to both sides. For example, had we transformed our y data using `sqrt(x), we would square both sides to obtain a y = ... solution; had we transformed our y data using a log function we would exponential a both sides to obtain 10 ^ (f^-1(y) ) = 10 ^ (log y) = y on the left and 10^(mx + b) = ... = 10^b * (10^m) ^ x on the right.
We would then compare the results of our y = ... model to our original data by plugging the original x values into the function we have obtained, and comparing with observed y values in our original data set.
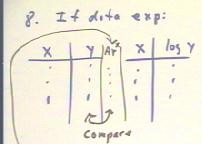
8. Exponential Model by linearizing exponential data
What process do we use to obtain an exponential model by linearizing the data and obtaining the best fit to the linearized data?
The figures below show how we transform our original data set using a log y transformation, then graph the linearized data and use regression or estimates to obtain the equation log y = mx + b. We solve the resulting equation using the 10^x, the inverse to the log function, as indicated that the bottom of the second figure. We obtain a model y = A r^x, which we then take back to the original data set. We create a column for A r^x and substitute our original x values, and compare them with the original data set to determine whether our model is reasonable.
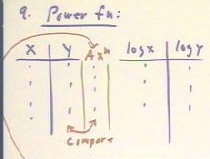
9. Power-function Model by linearizing power-function data
What process do we use to obtain a power-function model by linearizing the data and obtaining the best fit to the linearized data?
The figures below show how we transformed our original data set using log y vs. log x, then graph the results to obtain an equation log y = m log x + b. At the bottom of the second figure we see that we solve the equation for y using the 10^x transformation, which is inverse to the log transformations we have used. After simplifying we obtain a solution of the form y = A x^m, which we then take back to the original data set. We create a column for A x^m and substitute our original x values, and compare them with the original data set to determine whether our model is reasonable.
10. Modeling sequences by functions
Given a sequence, what strategies can we use to obtain a function a(n) to model the sequence?
We summarize these ideas in the figure below.
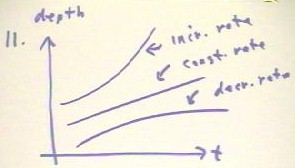
11. Interpretation and description of graphs
Given a depth vs. clock time graph for flow from a cylinder which might not be uniform (and which hence might not give us a quadratic model), how do we determine whether depth is changing at an increasing, decreasing or constant rate?
These behaviors are indicated in the graph below.
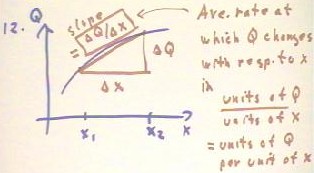
12. Interpretation of slopes
Given a graph of some specified quantity Q, measured in given units, vs. another specified quantity x with its specified units, how do we interpret the slope of the graph of Q vs. x between two specified x values?
The figure below depicts the graph of a quantity Q vs. x. Between any two points we can visualize the change in Q as a rise and the change in x as a run, so that the slope `dQ / `dx represents the rate at which Q changes with respect to x.
This rate will be in units of Q divided by units of x, which tell us how fast Q is changing in units of Q per unit change in x.
1. Solving Linear Equations
2. Solving Quadratic Equations
3. Solving Equations with Denominators
4. Solving Equation x^p = c
5. Solving Systems of Simultaneous Equations
6. Solving Exponential Equations
7. Solving Logarithmic Equations
1. The four basic functions
Sketch graphs of the four basic functions, clearly indicating the key graphing points. For power functions sketch graphs of the p= +-2 and +-3 functions.
2. Inverse functions
Give several examples of pairs of inverse functions. Explain how a table of y vs. x values for function which has an inverse is used to make the table for the y vs. x values of the inverse function, and how to construct a graph of the inverse of a function from the graph of the function. Explain also to determine from the graph of a function when the function does not have an inverse.
3. Stretching and shifting transformations
For each of the four basic functions, show the family A f(x), f(x-h) and f(x) + c; explain how to obtain the function A f(x-h) + c, and show one good illustrative example of this function.
4. Power functions
Sketch graphs of the p = +-2 and p = +-3 power functions, clearly showing their behavior at the key points and indicating how this behavior will continue for greater magnitudes of p.
5. Polynomial Functions
For a given degree n, indicate all possible numbers of zeros for a polynomial of that degree. Show every possible variation in the behavior of the function at its zeros and sketch a graph depicting each possibility.
6. Composite Functions
Express each of the following is a composite f(g(x)) of the four fundamental function families:
7. Constant Multiples, Sums and Differences of Functions
For each of the following function pairs graphically construct a graph of f(x) + g(x), f(x) - g(x), 2 f(x) and -1/3 g(x).
8. Products of Functions
For each of the following function pairs graphically construct a graph of f(x) * g(x) and f(x) / g(x).
"